Телеконтроль и телеуправление в энергосистемах - Телекомплекс ГРАНИТ
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Телекомплекс ГРАНИТ разработан СКТБ ’’Промавтоматика” ПО ’’Электроизмеритель” Минприбора СССР . Промышленный выпуск осуществляется заводом ’’Промавтоматика” (г. Житомир). Телекомплекс предназначен для построения телемеханических систем широкого применения: в энергетике, на объектах добычи и транспорта газа, на промышленных комбинатах, в горнодобывающей промышленности, коммунальном хозяйстве и т. п. [31].
Устройства пункта управления телекомплекса характеризуются наличием двух встроенных микроЭВМ (типа ЭЛЕКТРОНИКА-60), обеспечивающих программное управление сбором, передачей, приемом, обработкой и отображением всех видов телеинформации. Благодаря программному управлению устройства ПУ именуются интеллектуальными пунктами (ИП) системы. С целью повышения надежности и производительности обе микроЭВМ работают независимо друг от друга. Базы данных обеих микроЭВМ корректируются по межмашинному обмену текущей телеинформацией, получаемой из каналов связи.
Устройства КП телекомплекса выполняются в виде схемных (неинтеллектуальных) аппаратов. Они, как правило, устанавливаются на необслуживаемых пунктах и обеспечивают ввод, вывод и ретрансляцию разнообразной телеинформации без ее представления местному персоналу.
Комплекс ГРАНИТ может включать в себя различное число ПУ и КП при условии, что их общее число не превышает 128. Соединение между ПУ и КП возможно радиальными, магистральными и транзитными каналами связи (рис. 5.8). Число радиальных направлений с ПУ — до 128. Число КП на одном направлении при магистральной структуре — до 16. Транзитные (цепочные) линии связи обеспечивают двухнаправленную ретрансляцию информации между КП, число которых в цепочке не должно превосходить 10—15.
Наиболее важные радиальные каналы связи могут дублироваться.
Уплотненные каналы связи организуются внешними модемами (М), не входящими в состав аппаратуры телекомплекса, подсоединение модемов — по стыку С2.
Методы передачи и кодирования сообщенийСообщение с КП на ПУ передается в двух режимах: либо по запросу (вызову) с ПУ, либо автоматически — при изменении ТС или ТИТ по сравнению с ранее переданными значениями. Приемник должен подтвердить полученную информацию посылкой квитирующего сигнала по обратному каналу (положительное квитирование). При отсутствии квитанции в течение 5—10 с источник информации автоматически повторяет несквитированную информацию.
Обмен информацией между пунктами передачи и приема осуществляется по методу синхронной передачи данных в соответствии с протоколом HDLC. Сеанс связи начинается с обмена служебными кадрами между передающей и приемной станциями. Служебный кадр содержит 6 байт (рис. 5.9, а).
Первый и последний байты флаг предназначены для обозначения начала и конца кадра. Флаг всегда передается фиксированным значением 011111110 и выполняет роль синхрокода (маркера), Во всей передаваемой последовательности бит только маркер имеет шесть единиц подряд. Во всех остальных байтах через каждые пять следующих подряд единиц вставляется 0 (эта операция называется бит-стаффинг), чтобы отличить маркер от всех остальных видов сообщений. Такой маркер называется прозрачным, т. е. легко отличимым в последовательности передаваемых бит.
Байт адрес содержит адрес отправителя (получателя) сообщений.
В байте управление передаются сообщения, необходимые для установления связи между передатчиком и приемником: ’’готов (не готов) к приему”, ’’ошибка при приеме” и пр.
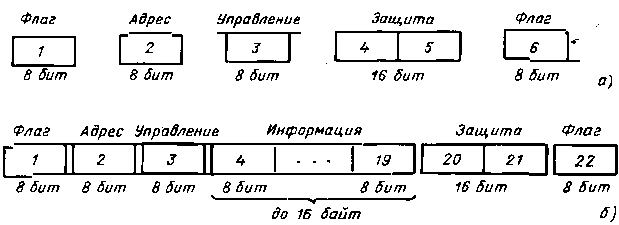
Рис. 5.9. Кадры телекомплекса ГРАНИТ: а - служебный; б - информационный
Далее следуют два байта защиты от ошибок в соответствии с правилами защиты циклических кодов [порождающий полином Р (х15)] и байт окончания кадра, повторяющий первый байт флаг.
Информационный кадр имеет длину 22 байта и отличается от служебного кадра тем, что после байта управление передаются до 16 байт информации (рис. 5.9, б). Кроме того, в байте управления передаются сообщения, определяющие вид посылок (данные, квитанция, вызов, запрос и т. п.) и функциональные адреса информации (ТС, ТИТ, ТИИ, ТУ и т. п.).
Между передачами информационных кадров (при отсутствии новой информации) в канал связи посылаются чередующиеся единицы и нули (так называемый меандр), которые используются для поддержания синхронной работы тактовых генераторов передатчика и приемника.
Основные функции и аппаратно-функциональные модулиТелекомплекс ГРАНИТ выполнен из ограниченного набора функциональных модулей с унифицированными внутренними связями с общей магистралью (магистрально-модульный принцип).
Устройство ПУ
Центральную часть ПУ образует блок микропроцессов, состоящий из двух одноплатных микроЭВМ ЭЛЕКТРОНИКА МС 1201.02 (800000 операций в секунду) с индивидуальными источниками питания. В состав каждой микроЭВМ входят: модуль процессора, ОЗУ емкостью 64 Кбайт и интерфейсные карты для сопряжения с пультовым терминалом (дисплей ВТА 2000-10) с элементами ввода—вывода, элементами внешней памяти ППЗУ и ОЗУ и с удаленными видеотерминалами (ВТА 2000-15).
МикроЭВМ конструктивно располагаются в общей части компоновочного каркаса ЭВМ, куда входят также субблоки системной магистрали и элементы управления микроЭВМ, перевода их в пультовый режим, элементы сигнализации неисправности и т. п.
К каждой микроЭВМ может быть подключен блок полупроводниковой памяти общей емкостью до 128 К (8 субблоков ППЗУ по 16 К в каждом). Элементы последовательного интерфейса ИРПС обеспечивают управление дисплейными модулями типа ВТА 2000-15 (до 8 шт.) и печатающими устройствами с интерфейсом ИРПС. Удаленность устройства ПУ от дисплейных терминалов — не более 0,5 км (при использовании кабеля связи ТГ-0,5 и скорости обмена до 9600 бит/с). Информация, набранная на экране любого из восьми дисплеев ВТА, вводится нажатием клавиши в буфер элемента сопряжений, откуда она считывается в память одной из микроЭВМ (при отсутствии более приоритетных задач). Вывод информации из микроЭВМ на любой из восьми видеотерминалов осуществляется побайтно. Скорость вывода определяется интерфейсом ИРПС (4,8; 9,6; 19,2 кбит/с) и загруженностью микроЭВМ выполнением текущих, более приоритетных задач.
Набор функциональных элементов в устройстве ПУ определяет объем и характер телемеханических функций, выполняемых телекомплексом.
Устройство ПУ обеспечивает прием и передачу сигналов по каналам связи.Число линейных субблоков (элементов сопряжения с каналом связи) в устройстве ПУ — до 128 — по одному линейному субблоку на каждое радиальное направление (для резервирования каналов требуется самостоятельный линейный субблок). Линейный элемент обеспечивает прием—передачу информации при скоростях 50, 100, 200, 300, 600 или 1200 бит/с по физическим линиям связи либо при подключении внешнего модема — по уплотненному каналу связи. Режим передачи — дуплексный или полудуплексный, структура подсоединения к линии связи — радиальная, магистральная или транзитная (изменение режима передачи, скорости и структуры канала достигается с помощью перемычек в субблоке).
Обеспечивается гальваническое отделение линейных цепей приема и передачи устройства ПУ (КП), а также фазирование цепей приемника по фронтам сигналов, поступающих из линии связи, формирование и контроль поступления меандров.
Структура линейных элементов ПУ и КП одинакова.
Телесигнализация двухпозиционных сигналов: воспроизведение на диспетчерском пункте — до 1024 ТС;
отображение ТС в составе технологических кадров на экранах дисплеев — до 4096 ТС;
контроль по состоянию датчиков ТС за простоем оборудования — до 100 контролируемых объектов на бланке печатающего устройства.
Телеизмерение текущих значений (ТИТ):
воспроизведение ТИТ указывающими (регистрирующими) приборами, число приборов — не более 64;
воспроизведение ТИТ контрольными цифровыми приборами в коде (без масштабирования); число контрольных приборов — не более двух, число контролируемых параметров — до 256;
отображение ТИТ в составе технологических кадров на экранах дисплеев; число параметров ТИТ — не более 2048; отображаемые параметры масштабируются по формуле А = кх + b, где А — отображаемая величина; х — записанное в памяти кодовое значение ТИТ; к — коэффициент масштаба; b — смещение шкалы. Максимальное число различных значений к= 64, b=20;
сравнение ТИТ с уставками с выдачей результатов сравнений при обнаружении расхождения на бланк печатающего устройства и на элементы сигнализации щита (пульта). Число сравниваемых параметров - до 200. Величины ’’верхней” и ’’нижней” уставок задаются в относительных единицах с шагом, равным 5%, и зоной нечувствительности в окрестностях уставки 2%.
Телеизмерение интегральных значений ТИИ: воспроизведение ТИИ контрольным цифровым индикатором (без масштабирования), число индикаторов — до двух, число контрольных параметров — до 256;
отображение ТИИ в составе технологических кадров на экране дисплея, число отображаемых значений ТИИ — до 1024, параметры ТИИ отображаются в натуральных единицах (в отмасштабированной форме);
периодическая регистрация значений ТИИ на бланке печатающего устройства.
Передача команд телеуправления (ТУ) двух- и многопозиционными объектами, расположенными на КП. Общее число однопозиционных команд на одном КП не превышает 128.
Обмен цифро - буквенной информацией (ЦБИ) с удаленными видеотерминалами по типу ’’экран—экран”. Число видеотерминалов типа ВТА 2000-15 — до восьми, одновременно обслуживается — до двух. Максимальное число знаков на экране 1920.
Аппаратные элементы ввода-вывода.Устройство ПУ располагает набором аппаратных элементов ввода—вывода, в число которых входят следующие функциональные модули.
Модуль вывода дискретных сигналов двух типов: 1) для ’’полусветлого” и ’’светлого” щитов и 2) для ’’темного” щита. Модули рассчитаны на воспроизведение до 64 ТС по схеме ’’полусветлого” щита и до 32 ТС по схемам ’’светлого” и ’’темного” щитов. Каждая выходная цепь модуля обеспечивает управление приборами сигнализации диспетчерского щита (сигнальными лампами, реле) при нагрузке не более 100 мА, 50 В. Предусмотрены режим мигания при изменении ТС и квитирование несоответствия сигналов и приборов сигнализации, а также режим контроля исправности сигнальных ламп.
Модуль вывода аналоговых сигналов— предназначен для управления до 16 указывающими (регистрирующими) приборами при токе до 5 мА и сопротивлении не более 2,4 кОм. Модуль позволяет проводить тестирование выходных цепей подачей фиксированного выходного тока, равного 2,5 мА, на все выходы модуля.
Модуль вывода цифровых сигналов — предназначен для контроля и цифрового отображения ТИТ и ТИИ в виде немасштабированных значений параметра от 1 до 255 и номера ТИ. Параметры ТИ отображаются на цифровом индикаторе поочередно с частотой изменения от 1 до 0,1 Гц. Число параметров ТИ для одного модуля вывода — до 128.
Модуль ввода команд ТУ — обеспечивает ввод команд ТУ от ключей управления на диспетчерском пульте (щите) или от набора клавиш дисплея с отображением команд на экране.