Телеконтроль и телеуправление в энергосистемах - Коды с обнаружением и исправлением ошибок
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Коды с обнаружением r-кратных и исправлением s-кратных ошибок должны обладать минимальным кодовым расстоянием, определяемым условиями (3.3) и (3.4). Увеличение кодового расстояния достигается увеличением числа разрядов кода п при уменьшении числа используемых рабочих комбинаций Nр, т. е. увеличением Киз.
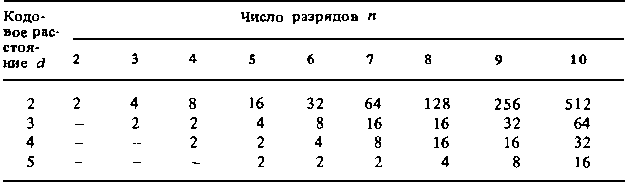
В табл. 3.12 приведено количество рабочих комбинаций с кодовым расстоянием d в зависимости от числа разрядов в коде п для d < 5 и и < 10 [10]. Из таблицы следует, что с увеличением d резко снижается число используемых (рабочих) комбинаций, так, при d = 5 (при этом код способен обнаруживать и исправлять двукратные ошибки) и n=10 число рабочих комбинаций N =16 из 210 = 1024 возможных комбинаций двоичного без избыточного кода.
Предельное число рабочих комбинаций, удовлетворяющих условию исправления всех ошибок кратности до s включительно, согласно Хэммингу составляет
 (3.15)
(3.15)
Практически этот теоретический предел достигается далеко не всегда. В частности, данные табл. 3.12 несколько занижают число Nр по сравнению с (3.15). Однако, изменяя исходные комбинации, с которыми производится сравнение всех остальных, можно получить данные, более близкие к (3.15).
Таблица 3.12. Количество рабочих комбинаций Nр с кодовым расстоянием d и числом разрядов п
Определение рабочих комбинаций, обладающих заданным кодовым расстоянием, из общего числа N = 2” двоичного без избыточного кода является основной задачей теории кодирования. Известно множество способов решения этой задачи, которые предлагают различные коды, обнаруживающие и исправляющие ошибки. Применительно к телемеханике наибольшее распространение получили так называемые разделимые групповые систематические коды [16].
Разделимые систематические групповые кодыВсе символы разделимых кодов разделяются на информационные символы и контрольные (проверочные) к: п = пи+ к.
Значения контрольных символов находятся по определенной системе в результате проведения некоторых линейных алгебраических операций над информационными символами. Поэтому такие коды получили название разделимых систематических кодов или просто систематических.
Все двоичные систематические коды являются групповыми кодами, поскольку они удовлетворяют условию существования алгебраической конечной группы относительно операции сложения по модулю 2.
Сокращенное обозначение группового кода G (п, пи), где п — общее число разрядов кода; — число информационных разрядов.
Набор рабочих кодовых слов определяется числом информационных разрядов:
![]()
Число проверочных символов в кодовом слове и способ их формирования определяются тем, какие и сколько ошибок должен исправлять или обнаруживать данный код.
Значения проверочных символов для каждой рабочей комбинации
определяются однозначно по информационным символам. Правила нахождения контрольных символов по информационным, обеспечивающие заданное минимальное кодовое расстояние, и определяют разнообразие разделимых групповых кодов.
Для определения всех комбинаций группового линейного кода достаточно определить контрольные символы только для единичных векторов информационной части кода, число которых равно пи. Совокупность информационных и контрольных символов для единичных информационных векторов, записанная в виде матрицы, образует так называемую образующую матрицу, содержащую пи строк и (пи + к) столбцов:
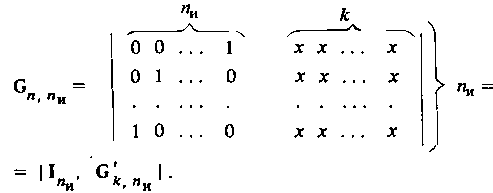
Величины х в подматрице ![]() принимают значения 1 или 0 в зависимости от правил формирования кода. Подматрица
принимают значения 1 или 0 в зависимости от правил формирования кода. Подматрица![]() называется дополняющей образующей подматрицей. Поскольку единичная подматрица I всегда детерминирована, все многообразие кодовых и комбинаций кода G(n, nи) определяет подматрица
называется дополняющей образующей подматрицей. Поскольку единичная подматрица I всегда детерминирована, все многообразие кодовых и комбинаций кода G(n, nи) определяет подматрица
По образующей матрице определяются все рабочие комбинации искомого кода. Для этого необходимо произвести сложение по модулю 2 строк образующей матрицы во всех сочетаниях.
Ниже рассматриваются два класса разделимых групповых кодов, получивших преимущественное распространение в телемеханике.