Телеконтроль и телеуправление в энергосистемах - Введение
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
ВВЕДЕНИЕ
В.1. ТЕРМИНОЛОГИЯТелемеханика — отрасль техники и техническая наука об управлении и контроле на расстоянии посредством преобразования управляющих воздействий и контролируемых параметров в сигналы, передаваемые по каналам связи. [1].
Телемеханика изучает проблемы, связанные с управлением объектами, удаленными от центра управления на значительные расстояния. Управление и контроль состояния удаленных объектов осуществляются из центра управления по протяженным каналам связи. Именно поэтому термин ’’телемеханика” включает слово ’’теле”, что означает даль, удаленность (ср. ’’телевидение”, ’’телефония”, ’’телеграфия” и пр.). Слово ’’механика” (греч. mechanike) означает мастерство, умение, управление. В современном русском языке понятие ’’механика” однозначно предполагает механические перемещения предметов. На ранних стадиях развития телемеханика действительно была связана исключительно с механическим воздействием на объекты управления и контроля (включение на расстоянии электромеханических реле, контакторов, управление показаниями стрелочных измерительных приборов и т. п.). Однако с развитием электронной техники и особенно с введением в контуры управления и контроля ЭВМ термин ’’телемеханика” в его первоначальном смысле стал достаточно условным.
Международный электротехнический словарь использует в английском тексте обобщающий термин TELECONTROL, который удачно объединяет понятия ’’управление” на расстоянии и ’’контроль” независимо от характера воздействия на объект (механического, электронного или другого). В русском языке этому термину наиболее соответствует термин ’’телеуправление”. Однако в отечественной литературе этот термин традиционно применяется лишь в отношении функции передачи команд (приказов) и не охватывает задачи наблюдения (контроля) за управляемым процессом. Поэтому в настоящем издании обобщающий термин TELECONTROL заменяется словосочетанием ’’телеуправление и телеконтроль”, либо применяется традиционный термин ’’телемеханика”, если иметь в виду его условность в упомянутом выше смысле.
Согласно ГОСТ 26.005—82 термин ’’телемеханика” включает в себя более частные понятия, связанные с функциями телемеханических систем: телеизмерение (ТИ), телесигнализация (ТС), телеуправление (ТУ), телерегулирование (ТР) и т. п.
Термин ’’телеконтроль” объединяет функции ТИ, ТС, а также любые другие функции НАБЛЮДЕНИЯ состояния управляемого (контролируемого) процесса на расстоянии.
В последнее время в зарубежной литературе, особенно американской, появился сокращенный термин, удачно объединяющий функции телемеханических устройств в системах управления: SCADA (Suppervisure Control and data acvisation), что в дословном переводе означает "управление на расстоянии и сбор данных”. По существу системы телемеханики в АСДУ энергосистем выполняют функции систем, именуемых на западе SCADA.
ОСНОВНЫЕ ЗАДАЧИ ТЕЛЕМЕХАНИКИ И ИХ ОСОБЕННОСТИЦентрализация управления.Телемеханика изучает и разрабатывает методы и средства технического и программного обеспечения централизованного управления и контроля производственными процессами сложных производственных комплексов, содержащих многочисленные территориально разобщенные, но связанные единым технологическим процессом объекты.
Эффективное управление такими сложными производствами возможно лишь из управляющих центров (пунктов управления — ПУ), куда должна поступать необходимая контрольная информация от всех объектов, участвующих в едином процессе производства. В результате обработки этой информации ПУ вырабатывают команды управления контролируемым процессом, учитывающие текущее состояние всех контролируемых объектов.
Процесс производства электроэнергии на электростанциях (тепловых, гидроэлектрических, атомных и др.) и распределения ее между потребителями, связанными с электрическими подстанциями высоковольтными линиями электропередачи, является классическим примером сложных технологических процессов, требующих применения телемеханических методов и средств централизованного управления и контроля.
Режим реального времени.Особенностью работы телемеханических систем является обеспечение управления и контроля в режиме реального времени. Контрольная и командная информация, доставляемая в центры и на объекты управления, должна поступать в темпе текущего управляемого технологического процесса. Это означает, что система телемеханики должна вносить минимальное запаздывание при передаче информации и управляющих воздействий. Обеспечением режима реального времени телемеханические системы отличаются от остальных систем передачи информации, таких, например, как системы передачи данных (АПД), телетайп, телеграф и т. п. В зависимости от скорости протекания контролируемых процессов допустимые запаздывания передачи информации, обеспечивающие режим реального времени, различны. Так, для систем автоматического регулирования частоты и активной мощности в энергосистемах запаздывание управляющих воздействий не должно быть больше 1 с, для систем телеуправления выключателями мощности — несколько секунд, для систем телеотключения — несколько десятков миллисекунд и т. д.
Высокая надежность и достоверность доставки информации.Системы телемеханики должны обеспечивать высокую надежность доставки информации и ее достоверность, поскольку ущерб от передачи неправильных команд или других оперативных сообщений и задержка в передаче этих сообщений могут привести к большим экономическим потерям, а в отдельных случаях — и к гибели людей, причем требуемая надежность доставки информации и ее достоверность должны обеспечиваться в условиях повышенных уровней помех, характерных для специальных каналов связи, используемых в энергетике (высокочастотная связь по высоковольтным линиям электропередачи, каналы тональной частоты по распределительным электрическим сетям, радиосвязь в условиях сильного влияния линий электропередачи и т. п.). Для этой цели в телемеханических системах широко используются различные методы помехозащищенного кодирования сообщений, обеспечивающие заданную вероятность не обнаруживаемых ошибок, дублирование (резервирование) каналов связи и т. д.
Эффективное использование каналов связи.Каналы связи являются наиболее дорогостоящей составляющей системы передачи информации. Поэтому наряду с передачей телемеханической информации они используются для телефонной, телеграфной и других видов связи. В телефонных каналах частотная полоса каналов телемеханики обычно ограничена надтональным или подтональным диапазоном, вследствие чего скорость передачи телемеханической информации обычно не превышает 200 бит/с.
В этих условиях особенно важно обеспечить высокую эффективность телепередачи данных, которая характеризуется отношением числа правильно переданных бит информации к общему числу передаваемых бит в сообщении в единицу времени.
Использование каналов связи с ограниченной частотной полосой пропускания в условиях сильных помех требует применения методов сжатия данных, предотвращающих занятие канала неэффективной повторяющейся информацией.
Обеспечение "наблюдаемости" контролируемого процесса и оперативности управления.Система телемеханики должна обеспечивать передачу в центр управления достоверной информации из стратегически важных пунктов энергосистем о реальном текущем состоянии процесса и выдавать диспетчеру эти данные в таком виде, чтобы он был в состоянии быстро и точно реагировать на отклонения режима от нормы. Обеспечение максимальной оперативности при ликвидации аварий в энергосистеме является одной из важнейших задач системы телемеханики.
Первичная обработка информации.Современные системы телемеханики, использующие встроенные микроЭВМ и микропроцессорную технику, решают задачу первичной обработки информации. Имеется в виду обработка информации как ”на местах” с целью ее ’’сжатия” перед передачей по каналу связи, так и в центрах управления при вводе в ЭВМ. Тем самым решается задача повышения эффективности использования каналов связи и ЭВМ оперативно-информационных комплексов АСДУ. На нижних уровнях диспетчерского управления, где специальные мини- или микроЭВМ, как правило, не устанавливаются, микропроцессорные системы телемеханики должны выполнять определенный набор функций по обработке информации для местных ОИК.
Самоконтроль, ремонтопригодность, расширяемость и совместимость.Эксплуатация средств телемеханики в энергосистемах представляет весьма сложную и трудоемкую задачу для обслуживающего персонала, особенно с учетом того, что информационные объемы и функции систем телемеханики непрерывно возрастают. Поэтому первостепенное значение приобретают такие характеристики систем, как самоконтроль устройств с автоматической сигнализацией и локализацией неисправностей, ремонтопригодность отдельных плат и блоков.
Система ТМ также должна допускать относительно несложную перестройку при расширении информационного объема и обеспечивать совместимость с существующими системами ТМ, ЭВМ ОИК и аппаратурой каналов связи, находящимися в эксплуатации (желательно программным путем, без изменения электронных блоков устройств).
Условия окружающей среды.Условия окружающей среды, в которых эксплуатируются устройства ТМ (УТМ), могут быть весьма разнообразными: от помещений с кондиционированным воздухом и постоянным обслуживанием до установки на необслуживаемых объектах и открытом воздухе. Надежная работа устройств телемеханики в столь широком диапазоне внешних условий гарантируется различными исполнениями УТМ — классами, ограничивающими их применение конкретными условиями эксплуатации. По многообразию классов, допускающих использование УТМ в различных условиях окружающей среды, системы телемеханики родственны системам релейной защиты и автоматики, что существенно отличает их от средств универсальных ЭВМ.
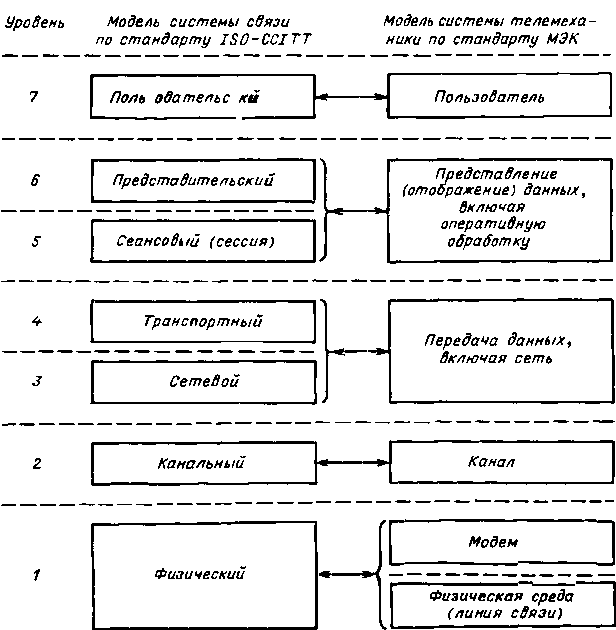
Рис. В.1. Сравнение уровневых структур моделей общей системы связи (по ISO-CCITT) и системы телемеханики по стандарту МЭК (для конфигурации "точка-точка”)
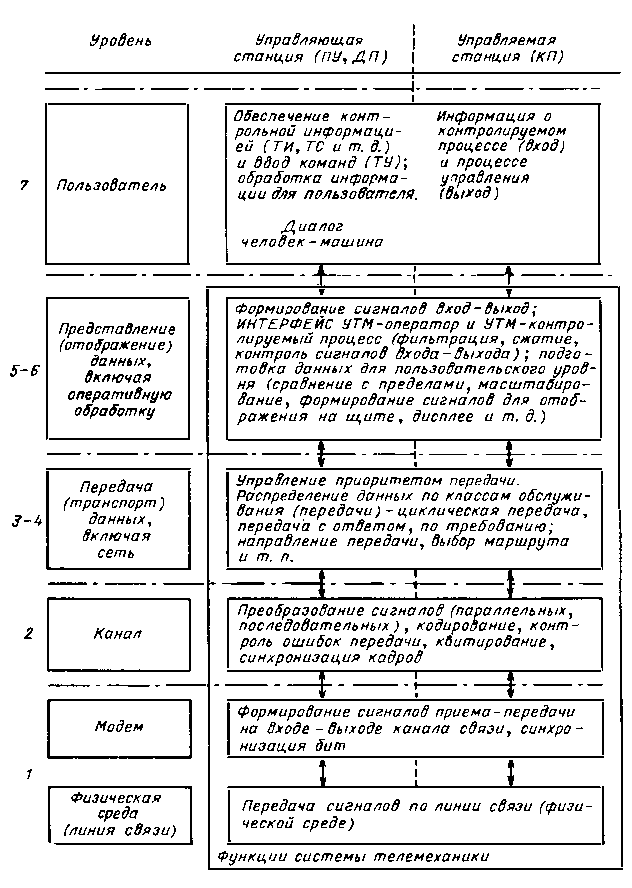
Рис. В.2. Уровневая структура функций системы телемеханики