Телеконтроль и телеуправление в энергосистемах - Передача сообщений в телемеханических системах
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Глава четвертая
ПЕРЕДАЧА СООБЩЕНИЙ В ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМАХ
ОСОБЕННОСТИ ПЕРЕДАЧИ СООБЩЕНИЙ В ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМАХСистемы телемеханики должны обеспечивать высокую достоверность передачи сообщений (телеконтроль) и высокую надежность передачи команд (телеуправление) в режиме реального времени, т. е. с наименьшим запаздыванием по отношению к контролируемым процессам.
Основные требования к передаче данных в системах телемеханики, используемых в энергосистемах, сводятся к следующему:
обеспечение высокой достоверности передачи в сложных условиях эксплуатации, в частности в условиях высокого уровня помех в каналах связи. В этих условиях передаваемые сигналы должны быть надежно защищены от не обнаруживаемых искажений (ошибок), от неправильного приема кодовых форматов вследствие ошибок синхронизации, от потерь сообщений и возникновения ложных сообщений, в том числе их трансформации;
обеспечение минимального времени передачи в условиях узкополосных каналов связи с повышенным уровнем помех путем применения короткоформатных кодов;
обеспечение передачи произвольной последовательности бит от источника данных, т. е. применение ’’бит-ориентированных” кодов.
КОЛИЧЕСТВЕННЫЕ ОЦЕНКИ КАЧЕСТВА ПЕРЕДАЧИ ДАННЫХДостоверность (целостность) данныхНарушение достоверности (целостности) передачи данных может возникать по причине появления не обнаруживаемых ошибок в принятом сообщении и (или) из-за потерь информации.
Количественной оценкой не обнаруживаемых ошибок является частота не обнаруживаемых ошибок, равная отношению числа необнаруженных ложных сообщений к общему числу переданных сообщений, либо соответствующая вероятность появления ложных не обнаруживаемых сообщений (вероятность того, что принятое сообщение окажется ложным).
Количественной оценкой потерь сообщений является частота потери сообщения, равная отношению числа необнаруженных (потерянных) сообщений к общему числу переданных сообщений, либо вероятность потери сообщения (вероятность того, что переданное сообщение будет потеряно).
Следует заметить, что лишь необнаруженные ошибки или потери сообщений определяют достоверность передачи данных, поскольку обнаруженные ошибки или потери приводят к переспросу данных либо к сигнализации ошибочного приема, в результате чего истинные данные могут быть восстановлены, хотя и с некоторой задержкой.
Эффективность передачи кодовых форматовСообщения, передаваемые по каналам связи, формируются в кодовые конструкции (кодовые форматы) длиной и бит, содержащие информационные контрольные к и служебные биты (биты синхронизации, адресные, функционального назначения и пр.).
Правильно (без ошибок) принятый кодовый формат гарантирует правильность содержащихся в нем сообщений. Эффективность передачи кодового формата (EFF) определяется отношением правильно принятых информационных бит к общему числу бит в формате:
![]()
где q = (1 — р) — вероятность правильного приема бита; qn — вероятность правильного приема всех п бит в формате.
При подсчете эффективности телепередачи данных в телемеханических системах следует также учитывать служебные сигналы, необходимые для ведения диалога между передатчиками и приемником, квитирующие сигналы и пр.
Согласно [1] скорость передачи информации определяется средним числом бит информации в секунду, переданных от источника данных и правильно принятых приемником. В соответствии с этим скорость передачи кодовых форматов определяется как эффективность передачи в единицу времени: EFF х v, где v — скорость передачи сигналов, бит/с.
4.3. СТАНДАРТНЫЕ КОДОВЫЕ ФОРМАТЫ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМАХ ТЕЛЕМЕХАНИКИСтандарт МЭК по системам телемеханики предусматривает определенные кодовые форматы для обеспечения заданных классов достоверности передаваемых данных в широком диапазоне информационной емкости, различной степени ’’интеллектуальности устройств и предназначенных для выполнения телемеханических функций на различных уровнях передачи диспетчерского управления.
К январю 1989 г. МЭК разработал [41] стандартные кодовые форматы для систем телемеханики, ориентированные на асинхронный метод передачи данных в ’’одном окне”* при использовании последовательности двоичных взаимонезависимых сигналов (двоичный симметричный канал без памяти) для полудуплексной и дуплексной связи.
В ближайшем будущем в рамках того же комитета МЭК предстоит разработка рекомендаций по применению стандартных протоколов синхронной передачи данных МКТТ в системах телемеханики. Эти протоколы должны быть адаптированы к требованиям систем телемеханики для обеспечения необходимых классов достоверности. В частности, известный протокол HDLC, определяемый стандартом ISO/DIS 3309.2, использует взаимозависимые сигналы и предназначен для синхронного метода передачи данных в системах связи общего назначения. Обычно он используется в условиях полного дуплекса. В Советском Союзе разработана система телемеханики ГРАНИТ, в которой используется одна из версий протокола HDLC (см. § 5.3).
Рекомендуемые МЭК стандартные кодовые форматы асинхронной передачи для телемеханических систем сведены в табл. 4.2.
Формат FT1.1 обеспечивает расстояние Хэмминга d = 2, кодовое слово содержит 11 бит: 1 бит — старт, 8 бит — информация, 1 бит — защита по четности (нечетности) и 1 бит — стоп. Добавление в конце предложения одного контрольного 11-битового слова образует формат FT 1.2 с кодовым расстоянием d=4.
Контрольное слово, так же как все остальные кодовые слова, имеет биты старт, стоп, бит четности и, кроме того, 8 бит — контрольную сумму CS, образованную арифметическим суммированием всех информационных байт предшествующих кодовых слов по модулю 256.
Форматы FT2 и FT3 образуются кодовыми блоками длиной до 16 байт (п= 128 бит). Информационные кодовые слова этих форматов содержат по 8 бит (байт, октет). Контрольные слова формируются по законам циклического кода. Контрольное слово формата FT2 имеет длину 8 бит, что обеспечивает d = 4 при числе информационных байт до 15.
Контрольное слово формата FT3 имеет длину 16 бит, что обеспечивает d = 6 при числе информационных байт до 14.
* Асинхронная (старт-стопная) передача в системах телемеханики - метод передачи, при котором передаются группы синхронных сигналов, разделенные интервалами произвольной длительности (МЭС, гл. 371 ’’Телемеханика”, 371-07 -07).
При синхронной передаче момент начала передачи сообщения, определяемый моментом посылки стартового сигнала, может быть произвольным.
Размер ’’окна передачи” - число кодовых предложений, которые можно передавать без подтверждения приема перед тем, как обнаружена ошибка в предложении, требующая автоматического повторения передачи [12].
Таблица 4.2. Стандартные кодовые форматы
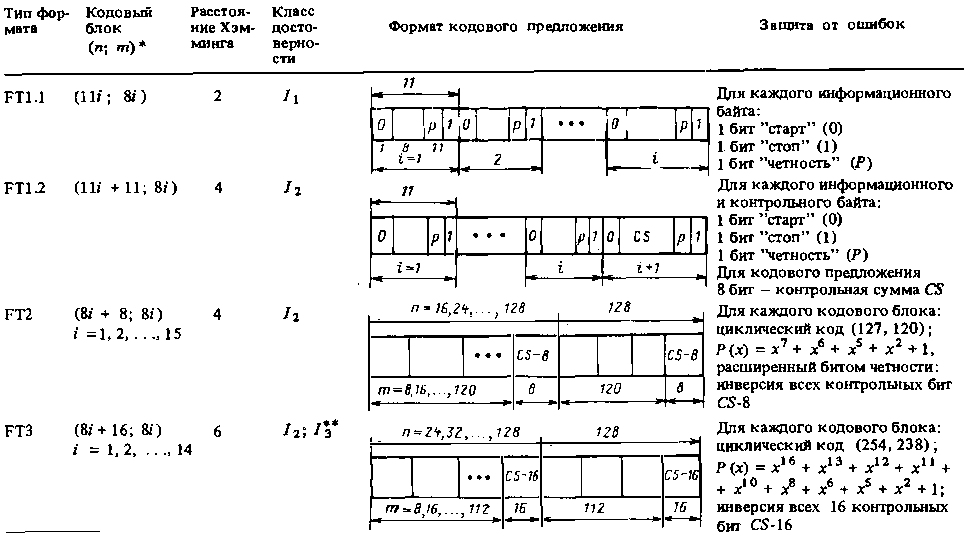
* Обозначения: п - общее число биг в кодовом слове блока; m - число информационных биг в кодовом слове блока; i - число кодовых слов в блоке (предложении) .
** Класс достоверности I3 обеспечивается при р < 10-3.
Форматы FT1.1 обеспечивают класс достоверности 11 и могут использоваться при передаче информации с относительно невысокий достоверностью, например в циклических системах ТИ.
Форматы FT 1.2 и FT2 обеспечивают класс достоверности 12 и должны применяться при передаче сообщений с повышенной достоверностью, например информации ТС, важных параметров ТИ и т. п.
Формат FT3 обеспечивает класс достоверности I2 во всем диапазоне изменения вероятности ошибки на бит (р< 0,5) и класс I3 при р < 10-3. Этот формат используется при передаче особо важных сообщений, например команд ТУ и т. п.