Переходные процессы при больших кратковременных возмущениях
Дополнительно по теме
Математическое описание переходных процессов в электрических системах
Переходные процессы при больших кратковременных возмущениях и малых изменениях скорости
Режимы при больших возмущениях и больших изменениях скорости
Режимы при малых возмущениях и малых изменениях скорости
Меры улучшения устойчивости и пропускной способности электрических систем и электропередач
ПЕРЕХОДНЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРОЦЕССЫ
Классификация
Переходные электромеханические процессы могут быть разделены на три основных вида:
Переходные процессы при больших кратковременных возмущениях и малых изменениях скорости. В этой группе рассматриваются динамическая устойчивость систем, большие колебания генераторов и др.
Переходные процессы при больших возмущениях и больших изменениях скорости. В этой группе рассматриваются работа синхронной машины при асинхронном режиме, процессы ресинхронизации после нарушения устойчивости, самосинхронизация генераторов, автоматическое повторное включение, асинхронный пуск двигателей и пр.
Переходные процессы при малых возмущениях и малых изменениях скорости. В этой группе рассматриваются вопросы статической устойчивости электрических систем, выбора способа автоматического регулирования возбуждения генераторов, обеспечивающего устойчивую работу системы.
Переходные процессы при больших кратковременных возмущениях и малых изменениях скорости
Допущения. При упрощенных расчетах этих режимов обычно принимают, что изменение электрической мощности происходит мгновенно (пренебрегают апериодической составляющей тока статора, не учитывают дополнительные потери в стали генератора). Приближенно эти факторы можно учесть уменьшением мощности турбины на величину, зависящую от вида и места возмущения.
Изменения сопротивлений генераторов и трансформаторов, обусловленные насыщением стали, не учитываются или учитываются приближенно уменьшением замещающего сопротивления ![]()
Расчеты несимметричных режимов ведут при помощи комплексной схемы замещения. Простейший расчет ведется, исходя из неизменности э. д. с. ![]() , приложенной за сопротивлением
, приложенной за сопротивлением ![]() .
.
При сделанных допущениях все изменения, происходящие в системе, могут быть отражены изменениями э. д. с. Eq, собственных и взаимных проводимостей, активных мощностей. Целью расчетов указанных режимов является определение характера изменения угла расхождения э. д. с. d во времени, изменений токов, напряжений, частоты и т. д.
Основное уравнение движения ротора. При малых изменениях скорости с небольшой (1- 1,5%) погрешностью можно принимать ![]() (см. раздел).
(см. раздел).
Основное уравнение движения ротора в относительных единицах:
![]()
где a - ускорение, эл.рад/с кв; ![]() - избыточная мощность, о. е.; TJ - постоянная инерции агрегата, с.
- избыточная мощность, о. е.; TJ - постоянная инерции агрегата, с.
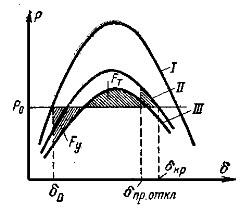
Исследование относительного движения ротора с помощью способа площадей. Способ площадей позволяет определить размах колебаний ротора при отклонениях, его от положения равновесия и найти тот предельный угол отключения аварийного участка системы, при котором устойчивая работа может быть сохранена. Предельный угол отключения, найденный из условия равенства площадок ускорения и торможения в схеме "станция - шины", определяется выражением, пригодным при любых видах коротких замыканий, линий электропередачи и т. д. (рис. 37-4):

где ![]() и
и ![]() -максимальные значения электрических мощностей, определенные соответственно по характеристикам послеаварийного и аварийного режимов;
-максимальные значения электрических мощностей, определенные соответственно по характеристикам послеаварийного и аварийного режимов; ![]() - критический угол.
- критический угол.
В этой формуле углы выражены в радианах. При определении ![]() при трехфазном к. з. вблизи шин
при трехфазном к. з. вблизи шин ![]() .
.
Рис. 37-4. Характеристики мощности. I - нормального режима; II - после-аварийного режима; III - аварийного режима.
Способ площадей может быть применен при исследовании режима системы, состоящей из двух станций, работающих параллельно на общие нагрузки, при определении мощности нагрузки, которую необходимо отключить, чтобы обеспечить устойчивость параллельной работы при отключении части генераторов в системе, при анализе эффективности форсирования возбуждения и эффективности регулирования мощности турбины для улучшения динамической устойчивости и т. д. Для систем со многими машинами этот метод неприменим.
Решение дифференциального уравнения относительного движения. Способ площадей не дает зависимости изменения угла от времени. Для выяснения этой зависимости необходимо решить основное дифференциальное уравнение движения ротора, т. е. найти ![]() . Аналитическое выражение зависимости
. Аналитическое выражение зависимости ![]() путем интегрирования уравнения движения можно получить только в некоторых частных случаях или при упрощающих допущениях. Так, в схеме "станция - шины", проинтегрировав уравнение движения, получим:
путем интегрирования уравнения движения можно получить только в некоторых частных случаях или при упрощающих допущениях. Так, в схеме "станция - шины", проинтегрировав уравнение движения, получим:
1) при ![]() - трехфазное к. з. у шин генератора или отключение генераторов от сети:
- трехфазное к. з. у шин генератора или отключение генераторов от сети:
2) при Ро = 0 - исчезновение момента сопротивления у синхронного двигателя, подключенного к сети:
3) Приближенное решение уравнения. Положим sind=d. Тогда
где ![]() - первоначальное отклонение.
- первоначальное отклонение.
При исследовании режимов, связанных с большими отклонениями угла, пользуются другими допущениями, которые приводят к более сложным вычислениям, но дают более точные результаты.
В общем случае для решения уравнения движения используют численный метод интегрирования- метод последовательных интервалов. При этом методе решения, применяемом в простейшем его виде, весь процесс изменения угла во времени разбивают на интервалы Dt, предполагая, что DР остается неизменным в течение каждого интервала.
Выражения для приращения угла в первом и последующих интервалах имеют вид:
Здесь ![]() , где время Dt и постоянная TJ выражены в секундах, а угол
, где время Dt и постоянная TJ выражены в секундах, а угол ![]() - в электрических градусах.
- в электрических градусах.
По приращениям угла во времени строится зависимость ![]() . Величина Dt принимается обычно равной 0,02-0,1 сек.
. Величина Dt принимается обычно равной 0,02-0,1 сек.
Если на каком-то интервале n режим изменяется скачком (отключается часть генераторов, повреждена линия), избыток мощности, составляющий ![]() , внезапно изменяется на величину
, внезапно изменяется на величину ![]() , то определение приращения угла в следующем интервале производится по формуле
, то определение приращения угла в следующем интервале производится по формуле
![]()
При этом ![]() находят по собственным и взаимным проводимостям для измененного режима.
находят по собственным и взаимным проводимостям для измененного режима.
Этот расчет применим для схем любой сложности при любом числе станций.
Применение метода последовательных интервалов при учете электромагнитных переходных процессов. В этом случае ![]() . В каждом интервале к дифференциальному уравнению движения ротора каждой станции добавляются соотношения:
. В каждом интервале к дифференциальному уравнению движения ротора каждой станции добавляются соотношения:
а) между э. д. с. E'q, э. д. с. Eq и смещением векторов этих э. д. с.
это уравнение справедливо в любой момент времени;
б) между изменениями э. д. с. Eq и скоростью изменений э. д. с. E'q
![]()
где Eqe - вынужденная э. д. с, пропорциональная напряжению возбудителя (при расчете берется среднее значение за интервал времени Dt).
Расчет переходного процесса для неявно-полюсной машины проводится при этом в следующем порядке:
1. В исходном режиме определяют значения мощности Ро, угла ![]() , переходной э. д. с. ? ?, э. д. с. E'qo и соответствующего ей напряжения возбудителя
, переходной э. д. с. ? ?, э. д. с. E'qo и соответствующего ей напряжения возбудителя ![]() .
.
2. Определяют собственные и взаимные проводимости, причем для генераторов в схеме замещения берется синхронное сопротивление.
3. Согласно характеристикам регуляторов и возбудителей строят кривую изменения напряжения на зажимах возбудителя ![]() и соответствующих значений э. д. с. при стационарном режиме Eqe (кривые различаются лишь масштабами).
и соответствующих значений э. д. с. при стационарном режиме Eqe (кривые различаются лишь масштабами).
4. Определяют значения э. д. с. холостого хода для первого момента нарушения режима работы ![]() ; при этом значения E'q и d принимают те же, что и в исходном (нормальном) режиме
; при этом значения E'q и d принимают те же, что и в исходном (нормальном) режиме ![]()

5. Находят изменение переходной э. д. с. в течение первого расчетного интервала:
где ![]() - среднее значение
- среднее значение ![]() в данном интервале времени.
в данном интервале времени.
6. Определяют значения Eq в конце данного и начале следующего интервалов:
![]()
7. Определяют активную мощность генератора в начале данного интервала:
![]()
8. Находят небаланс между механической и электрической мощностями генератора ![]() .
.
9. Определяют приращение угла в каждом расчетном интервале по выражениям, приведенным выше.
10. Находят угол в начале следующего интервала:
![]()
По значениям э. д. с. E'q и угла d в начале следующего интервала проводится его расчет. Расчет ведется до тех пор, пока при заданном времени отключения повреждения не будет ясен характер изменения угла во времени (затухающий, нарастающий).
Машины с явно выраженными полюсами заменяются фиктивной машиной с ![]() и э. д. с.
и э. д. с. ![]() , определяемой из выражения
, определяемой из выражения
Последовательность расчета та же.
Расчет переходного процесса в сложной системе. Все генераторы любого числа станций замещаются э. д. с. Еq и сопротивлением ![]() (см. выше). Механическая мощность турбин обычно принимается постоянной. Нагрузки систем в простейших расчетах представляются постоянными полными сопротивлениями
(см. выше). Механическая мощность турбин обычно принимается постоянной. Нагрузки систем в простейших расчетах представляются постоянными полными сопротивлениями ![]() .
.
Для любого режима (нормального, аварийного, послеаварийного) находят собственные и взаимные проводимости. Временем отключения повреждения задаются.
Значения всех э. д. с. в начале любого интервала зависят от переходных э. д. с. E'q и углов между роторами машин.
Связь переходных э. д. с. E'q и расчетных э. д. с. ![]() (или Eq - для неявнополюсных машин) с параметрами систем устанавливается уравнениями вида
(или Eq - для неявнополюсных машин) с параметрами систем устанавливается уравнениями вида
При любом резком изменении режима все переходные э. д. с. остаются неизменными, а все э. д. с. Eq и ![]() изменяются.
изменяются.
Любое нарушение режима сводят к мгновенному изменению параметров системы, что отражается в изменениях коэффициентов а и А. Подставив в эти уравнения значения э. д. с. ![]() , т. е. соответствующих исходному режиму и значения коэффициентов а и А, отвечающих аварийному режиму, находят значения всех э. д. с. от
, т. е. соответствующих исходному режиму и значения коэффициентов а и А, отвечающих аварийному режиму, находят значения всех э. д. с. от ![]() до
до ![]() . Для этого в каждом интервале Dt решается система из m уравнений с m неизвестными. В каждом интервале значения э. д. с. E'd и коэффициенты а находятся согласно соответствующим формулам, использующим данные предшествующего интервала.
. Для этого в каждом интервале Dt решается система из m уравнений с m неизвестными. В каждом интервале значения э. д. с. E'd и коэффициенты а находятся согласно соответствующим формулам, использующим данные предшествующего интервала.
Дополнительно по теме
Математическое описание переходных процессов в электрических системах
Переходные процессы при больших кратковременных возмущениях и малых изменениях скорости
Режимы при больших возмущениях и больших изменениях скорости
Режимы при малых возмущениях и малых изменениях скорости
Меры улучшения устойчивости и пропускной способности электрических систем и электропередач